UAV Formation Flight Control
- Over View -
Project : 생화학 재난 예방·감시용 무인 장비 개발
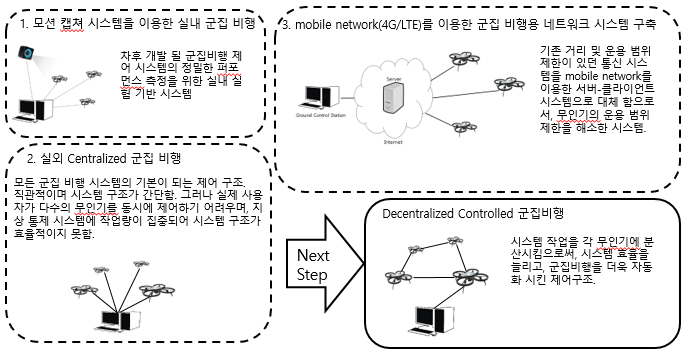
Objective : 재난 예방·감시 목적의 무인항공기 군집 비행 시스템 연구 및 개발
[1] M. Kim, S. Lee and H. Son, “Effects of time delay on long range formation control for unmanned aerial vehicles,” Int. Conf. Ubiquitous Robots and Ambient Intelligence (URAI), 2016
Active Fault Tolerant Control System
–
-
- Over View -
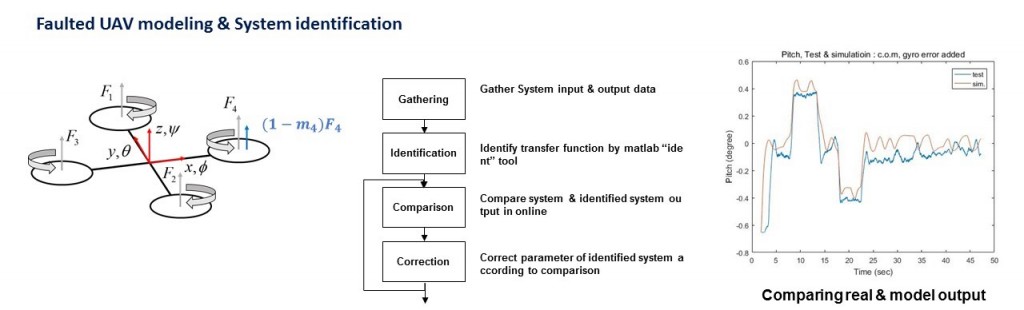
Before applying fault tolerant control and many other model based control mechanism, system has to be identified. By simplifying system and gathering data, system parameter can be calculated. Identified system parameter also can be used to construct simulation quite similar to real system. With that simulation, control methods and control gain can be verified before flight.
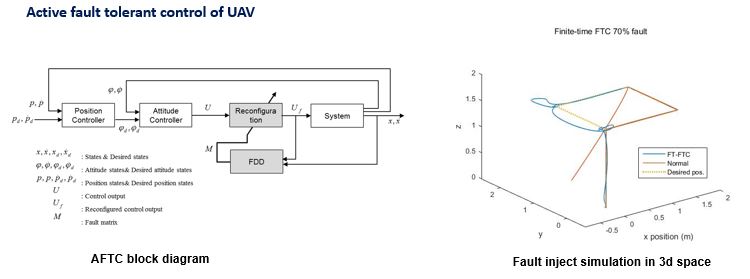
The reconfigurable control method subject to failure of motors of quadrotor is developed, which can be additively adopted for controller of quadrotor and can handle large range of failure of motors with limitation of motor thrust. Mathematical formulations of reconfigurable control system for the cases of failure are derived, which is derived whether motor limit constraint is exceeded. This is followed by finite-time convergence of position and attitude to the desired states of the faulty system to the sliding manifold. To validate proposed control system, three different cases are presented with numerical simulation and experiment will be implemented soon.
[1] W. Chung and H. Son, “Fault-Tolerant Control of Multirotor UAVs by Control Variable Elimination,” IEEE/ASME Trans. Mechatronics, 2020
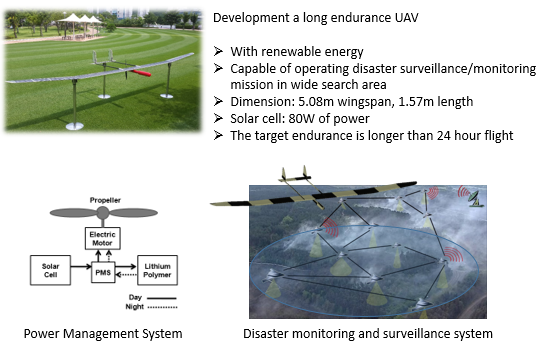
High Altitude & Long Endurance UAV
- Over View -
Under construction
Multi-copter UAV Design
Power system (Hybrid), Hardware
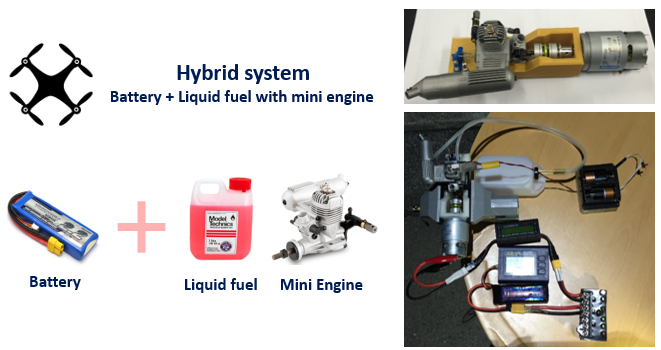
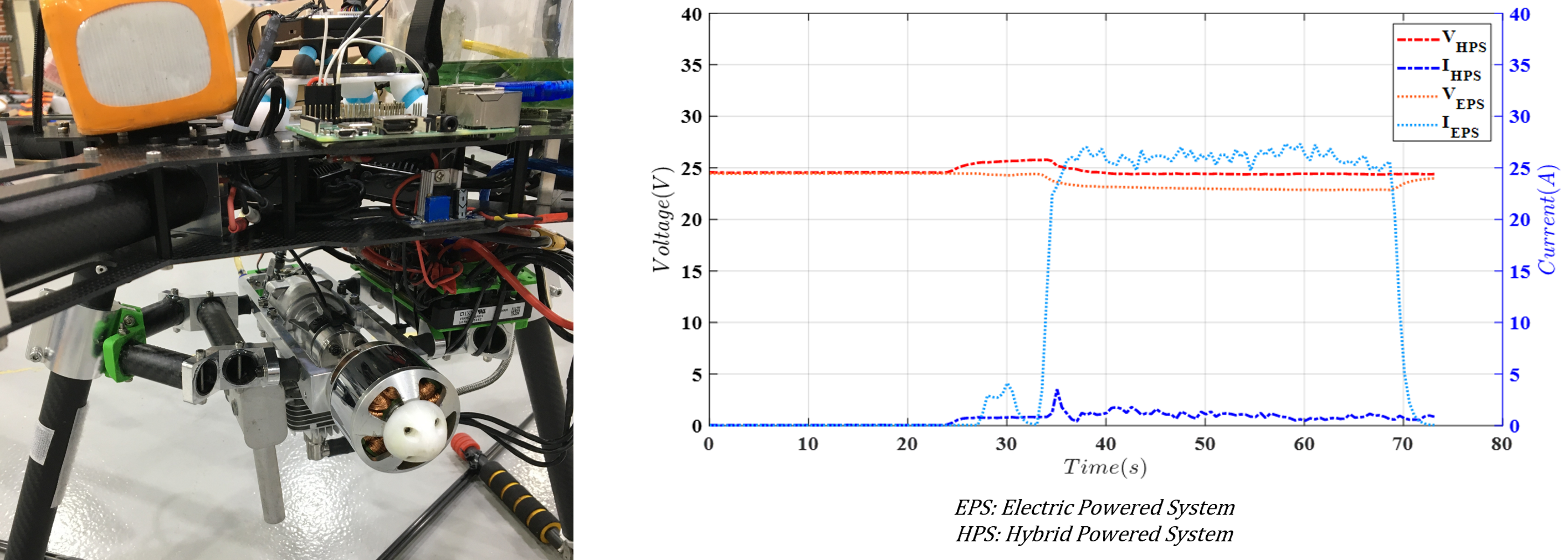

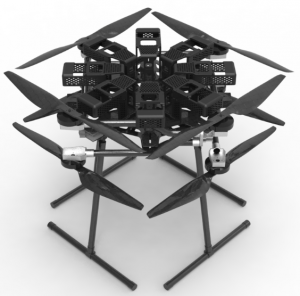
- Over View -
Under construction
Hybrid power system (HPS) is developed and attached to UAVs to improve flight endurance and payload availability. With engine-generator system, battery usage nears zero during flight.
Modeling and control of UAV with COG and mass variation
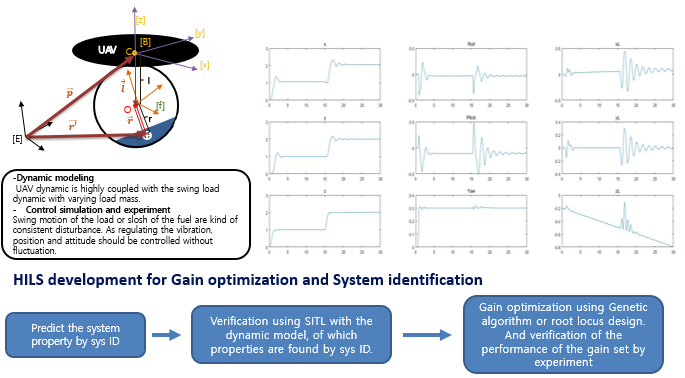
- Over View -
Experimental result of step inputs tracking control of quadrotor with a suspended payload. Also after finishing tracking, sudden impacts were given to the payload. Proposed LQ control shows good tracking and regulating performance. Also, the payload position was estimated in real-time
This video shows optimal antisway-low snap trajectory generation and LQT tracking control of the quadrotor with the suspended payload. Thanks to the well-generated trajectory, payload doesn’t move drastically and extensively. In turn, payload doesn’t collide with the obstacles.
[1] S. Lee, D. K. Giri and H. Son, “Modeling and control of quadrotor UAV subject to variations in center of gravity and mass,” Int. Conf. Ubiquitous Robots and Ambient Intelligence (URAI), 2017
[2] S. Lee and H. Son, “Anti-Sway Control of a Multirotor with Cable-Suspended Payload,” IEEE Trans. Control Sys. Technol., 2021
Biomimetic UAV
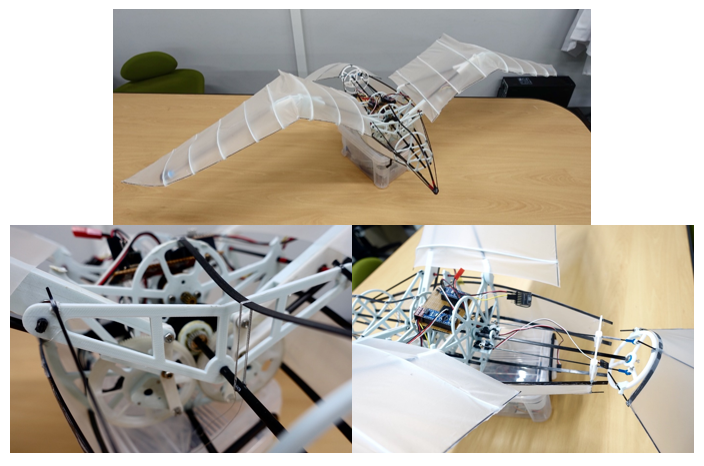
- Over View -
Mimicking seagull, a robotic bird requires flapping and twisting wings. Using a main motor and 4 servo motors, it can stroke its wing and make tail motion. Controlling with the transmitter, a throttle motor and servo motors which twist wing and make tail movement are coded with Arduino. Arduino receives PWM signal from transmitter, converts it into degree of rotation of servo motors on tail. Also for twisting wing, Arduino receives signal from hall effect sensor, and triggers servo motors on each end of wing to twist.
Target Tracking
- Over View -
[1] S. A. Memon, H. Son, K. H. Memon, and A. Ansari “Multi-scan Smoothing for Tracking Manoeuvering Traget Trajectory in Heavy Cluttered Environment ,” IET radar, sonar & navigation, 2017
[2] S. A. Memon, M. Kim, and H. Son, “Tracking and Estimation of Multiple Cross-Over Targets in Clutter,” Sensors, 2019
[3] M. Shin and H. Son, “Linear multi-target tracking for ultra-wide band radar system in heavily cluttered environment,” IEEE Int. Conf. Advanced Intelligent Mechatronics (AIM), 2019
[4] S. A. Memon, M. Kim, M. Shin, J. Daudpoto, D. Muhammad, and H. Son, “Extended smoothing joint data association for multi-target tracking in cluttered environments,” IET radar, sonar & navigation, 2019
[5] M. Shin and H. Son*, “Multiple Sensor Linear Multi-Target Integrated Probabilistic Data Association for Ultra-Wide Band Radar,” IEEE Access, 2020.