Multi-DOFs Motion Platform for Virtual Reality

- Over View -
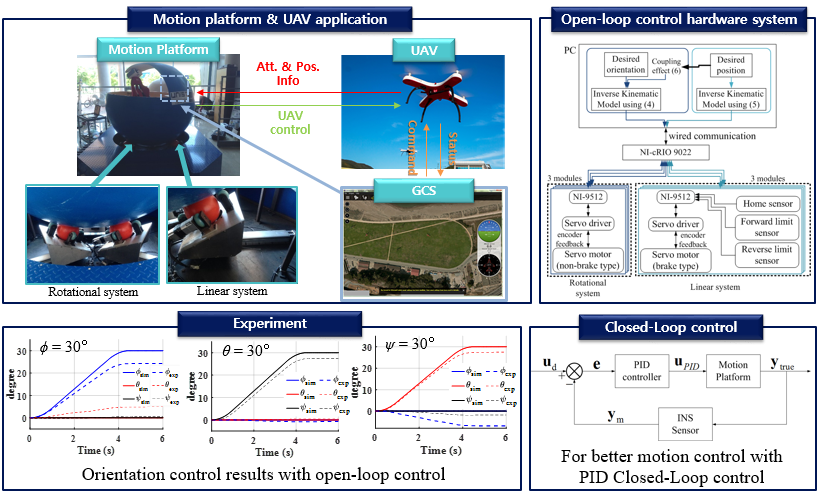
This research presents to develop a new concept and design of a multi-degree of freedom (DOF) motion platform capable of controlling 3 DOFs rotational and 3 DOFs translational motion to provide unlimited range of motion for virtual reality (VR) based on spherical wheels. Multi-DOF motion platforms have been developed for various applications such as motion simulators and game industry. In addition, motion recognition is one of main features for VR with visual display. However, existing motion platforms have critical limits of range of motion in motion realization due to mechanical linkages and their actuating mechanism. In addition, unnatural motion control may cause mismatch in VR environment. The motion platform developed in this paper can provide 6 DOFs motion and in particular, unlimited range of rotational motion without motion singularity. The design is compact and lightweight offering fast speed of response. Kinematic and dynamic analysis of the platform are investigated to provide a basis of motion control in an open-loop. Performance of motion control is demonstrated in real scaled size (ride on platform). The experimental results show that the platform is successfully capable of multi-DOF motion control and can be utilized for various applications in future demands.
[1] S. Park and H. Son*, “Multi-degree of freedom platform based on spherical wheels,” IEEE Int. Conf. Advanced Intelligent Mechatronics (AIM), 2015
[2] S.-M. Lee, S. Park, and H. Son*, “Multi DOFs motion platform based on spherical wheels for unmanned systems,” Int. Conf. Ubiquitous Robots and Ambient Intelligence (URAI), 2016
[3] S.-M. Lee and H. Son*, “Multi-Degree-of-Freedom Motion Platform based on Spherical Wheel,” IEEE/ASME Trans. Mechatronics, 2017
[4] S.-M. Lee and H. Son*, “Six DOFs motion platform using omni-spherical wheels,” IEEE Int. Conf. Advanced Intelligent Mechatronics (AIM), 2018
[5] S.-M. Lee and H. Son*, “Three degree-of-freedom orientation measurement for spherical wheel motion platform using optical sensors,” IEEE Int. Conf. Advanced Intelligent Mechatronics (AIM), 2019
[6] S.-M. Lee and H. Son*, “Improvement of Design and Motion Control for Motion Platform based on Spherical Wheels,” IEEE/ASME Trans. Mechatronics, 2019
[7] S.-M. Lee and H. Son*, “Sliding-mode control with multi-sensor fusion for orientation of spherical motion platform,” IEEE Int. Conf. Advanced Intelligent Mechatronics (AIM), 2020
[8] S.-M. Lee, K. Xia, and H. Son*, “Robust Tracking Control of Spherical Motion Platform for Virtual Reality,” IEEE Trans. Ind. Electron., 2021
[9] S.-M. Lee and H. Son*, “Multi-sensor Integration and Fusion for Control of Multi-DOF Spherical Motion Platform,” Mechatronics, 2021.
[10] S.-M. Lee and H. Son*, “Prediction-Based Preview Control of Motion Platform With Time Delay,” IEEE Trans. Intell. Transp. Syst., Accepted.